随着全球海运贸易的持续增长,智能船舶的自主航行技术成为航运业发展的关键。欠驱动船舶(仅依靠推进器和舵装置实现运动控制)在复杂海况下面临模型不确定性和外部扰动等挑战,传统控制方法难以兼顾轨迹跟踪精度与航行安全性。近期,天津理工大学崔建辉教授团队在《Ocean Engineering》(JCR Q1,IF=5.5)上发表题为《Adaptive trajectory tracking control of underactuated ships using parameter prediction based neural network》的论文,提出一种基于参数预测神经网络的自适应控制方案,显著提升船舶在动态环境中的跟踪性能与安全性。
研究背景:轨迹跟踪的挑战与需求
欠驱动系统因控制输入少于自由度,其轨迹跟踪控制设计尤为复杂。现有研究多聚焦于提升跟踪精度,却忽略了频繁舵角调整和加速度突变对航行安全性的影响。此外,船舶模型中的水动力参数不确定性及风浪扰动进一步增加了控制难度。如何平衡跟踪精度与安全性,成为智能船舶轨迹跟踪领域的关键问题。
方法介绍:自适应协调控制方案
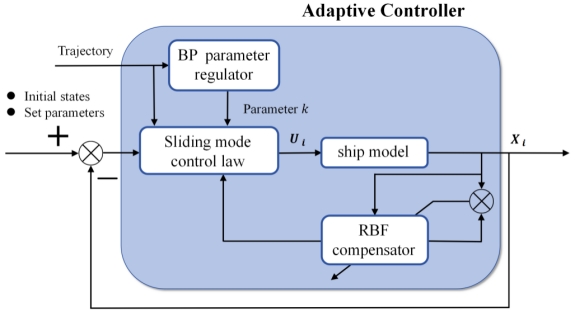
针对欠驱动船舶横向推进能力不足、易受外界扰动影响的问题,研究团队在滑模控制框架下,引入径向基函数(RBF)神经网络对模型不确定性进行在线补偿,提升系统在复杂工况下的鲁棒性与控制精度。
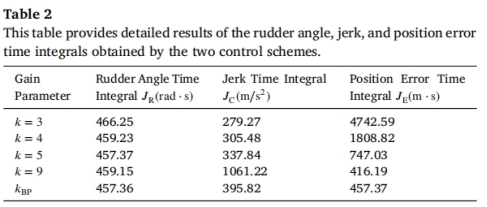
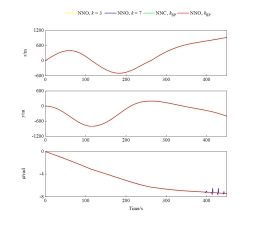
在此基础上,研究进一步考虑了传统轨迹跟踪控制中往往被忽视的航行安全问题。通过引入舵角变化与冲击度(Jerk)等指标,构建了兼顾位置误差和平稳性的多目标性能评价函数,使控制策略更加符合实际航行需求。
创新技术:实时参数自适应调节
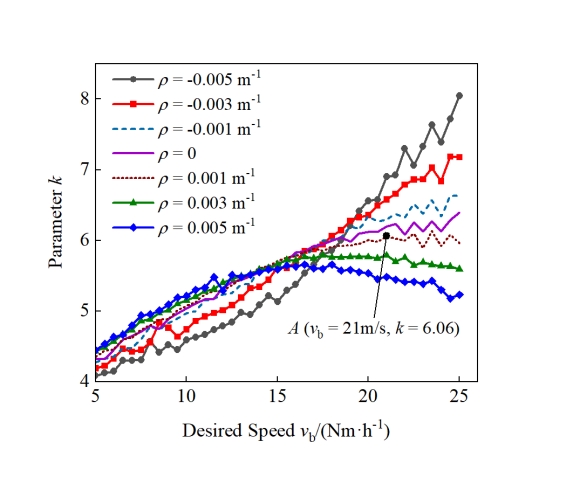
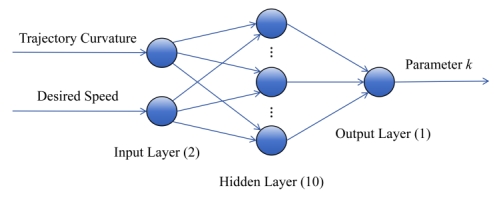
为实现控制参数在不同轨迹曲率和期望速度条件下的自适应调整,研究团队采用粒子群优化算法(PSO)进行离线寻优,获得不同工况下的最优控制参数样本。随后,基于样本数据训练反向传播(BP)神经网络,建立轨迹曲率、期望速度与最优控制增益之间的非线性映射关系。
该参数预测器采用“离线训练、在线预测”的实现方式,能够在保证实时性的前提下,动态调整控制参数,实现轨迹跟踪精度与航行安全性的平衡。
仿真验证:复杂场景多角度评测
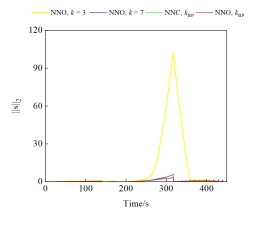
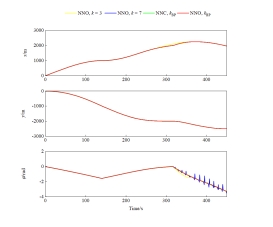
研究团队构建了多种复杂场景,包括变速变曲率严苛条件。仿真结果表明,所提出的基于参数预测神经网络的自适应控制方法,能够在存在模型不确定性和外界扰动的情况下实现复杂场景高精度轨迹跟踪。与传统控制方法相比,该方法在保证跟踪精度的基础上显著降低了舵角调节幅度和冲击度水平,使船舶运动更加平稳,整体航行安全性得到明显提升。

研究意义:促进智能船舶更加贴合需求
该研究成果为欠驱动船舶及自主水面航行器的智能控制提供了一种兼顾安全性与控制性能的新思路,在智能船舶、自主航行系统及海洋工程装备等领域具有启发意义和工程应用前景。相关成果的发表,对推动智能运动控制向更加智能化、人性化方向发展具有积极意义。
研究团队介绍
研究团队由天津理工大学海运学院正高级船长崔建辉教授担任负责人,为论文通讯作者。硕士研究生邓子睿为论文第一作者。天津理工大学海运学院朱忠显副教授,中国船舶集团有限公司第七〇七研究所九江分部但杨文研究员和谢华伟研究员共同完成研究工作。