【工作介绍】
近日,天津理工大学海运学院郝帅团队在国内航海类高水平期刊《中国航海》上发表题为“一种大型船舶减速鳍的实尺度减速性能研究”的研究论文。为了提升现有船舶的减速性能,该研究提出了一种减速鳍装置,基于实尺度计算流体动力学(CFD)绕流阻力分析研究其减速性能,并对其减速效果进行仿真。研究表明,配备设计得当的减速鳍,可明显提升大型船舶的减速及转艏性能,从而大幅改善船舶操纵性及航行安全性。

【研究背景】
大型船舶的操纵性通常较差,其主要表现为加减速耗时、转艏迟缓,航行中遭遇突发情况存在撞船风险,不但会造成人员伤亡、经济损失,甚至可能破坏海洋环境。对此,航运业过去始终依靠船员的驾驶经验来弥补,如预留充足的减速冲程、限速及限制最小船间距等。然而,这些过于保守的应对措施极大地降低了海上通航效率,也增加了操船难度。而在船舶智能化、无人化不断发展的今天,大型船舶的操纵性不佳还导致了自主操船指令的下达存在严重的回馈迟滞,进而对实现船舶自主闭环控制提出了更为严苛的要求。现代船舶虽然时常配备减摇鳍,但该装置因结构强度有限,主要用于减摇,不适用于船舶减速,因此需提出一种新型船舶减速装置。
【主要内容】
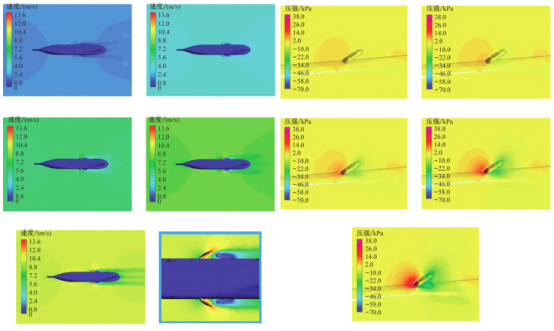
本研究以客机及跑车为启发,提出了一种用于大型船舶快速减速的减速鳍装置,将其对称布置于船舶两舷的设计水线之下。为了研究该装置的减速效果,以大型集装箱船的标准船型为例,基于CFD理论及数值计算方法,以实尺度船体建模研究该船型配备减速鳍后在高速航行中的减速及转艏性能改善情况。

【研究意义】
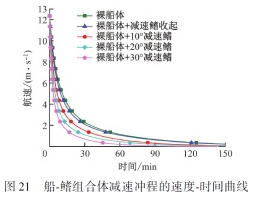
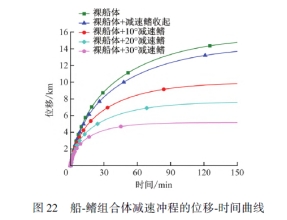
本文通过在船舶两舷水线以下对称布置一种减速鳍装置来改善大型船舶的减速及转艏性能。当船舶制动时,展开两舷减速鳍,通过增加船体在水中的航行阻力来辅助船舶制动;当船舶转向时,展开其中一舷减速鳍,利用船体两舷受到的不平衡力作用而助船转向。该研究所提出的减速鳍装置能明显提升大型船舶的减速及转艏性能,从而大幅改善船舶操纵性及航行安全性。与此同时,良好的船舶操纵性将大幅降低无人船安全航行所需的技术门槛,也为未来实现无人船编队航行的整体控制提供更为有力的技术支撑。
【原文链接】
HAO Shuai, LI Zuozhong, ZHANG Zedong, NAN Fangfang, PAN Ji, ZHAO Chongyu. Real-scale research on deceleration performance of a pair of spoiler fins designed for large ships[J]. Navigation of China, 2025, 48(2): 98-109. DOI:10.3969/j.issn.1000-4653.2025.02.013